Perpendiculars, Orthogonals, Right Angles
We use five standard methods for writing the equation of a line in the plane. \begin{align*} ax+bx+c=0 & \quad \text{Standard form }\\ y=mx+b & \quad\text{slope intercept form}\\ y-C_{y}=m\left(x-C_{x}\right) & \quad\text{point slope form }\\ \left(\begin{array}{c} x\\ y \end{array}\right)=\left(\begin{array}{c} C_{x}\\ C_{y} \end{array}\right)+t\left(\begin{array}{c} u_{x}\\ u_{y} \end{array}\right) & \quad\text{Parametric form}\\ r(t)=\frac{d}{\cos(t-\theta_{\perp})} & \quad\text{Polar form} \end{align*} These are $\textbf{mostly}$ interconvertible.
Standard Form
$$ax+by+c=0$$
This algebraic form for the line has an advantage in not using a slope. A vertical line cannot have a slope, but in this form it doesn't matter. In standard form, if the $y$ value is zero, then the line will be vertical.
Suppose we have a point, P, not on the line. Then the shortest distance to the line, resulting in a right angle intersection is given by $$\text{distance}=\left|\frac{aP_{x}+bP_{y}+c}{\sqrt{a^{2}+b^{2}}}\right|$$
To create the perpendicular line through $P,$ we swap $a$ and $b$ in the standard form equation, and change the sign of one of them, it doesn't matter which one. Then plug $\left(P_{x},P_{y}\right)$ into the equation to replace $x$ and $y,$ and put $c'$ in place of $c.$ We will have to solve for $c',$ since we have now written the perpendicular line. $$\begin{aligned}\text{Standard Form Original Line: } && ax+by+c =0\\ \perp\ \text{line equation: } && bx-ay+c' =0\\ \text{Subst. P_{x},P_{y}:} && bP_{x}-aP_{y}+c' =0\\ \text{Solve for c': } && c'= aP_{y}-bP_{x}\\ \text{and substitute it into the } & \perp\ \text{line equation}\\ \perp\ \text{line equation: } && bx-ay+aP_{y}-bP_{x} =0 \end{aligned}$$
To get the intersection point, we have to solve simultaneously the standard form equation and the perpendicular line equation. That is, solve these two equations simultaneously for $x$ and $y.$ $$\begin{aligned}ax+by+c & =0\\ bx-ay+aP_{y}-bP_{x} & =0 \end{aligned}$$ The result is the right angle intersection point. $$\left\{ x=\frac{P_{x}b^{2}-P_{y}ab-ac}{a^{2}+b^{2}},y=\frac{P_{y}a^{2}-P_{x}ab-bc}{a^{2}+b^{2}}\right\}$$
Slope Intercept Form
$$y=mx+b$$ Here, $m$ is the slope of the line and $b$ is the $y$-axis intercept. Suppose we have point, $P$, not on the line. Then the shortest distance to the line, resulting in a right angle intersection is given by $$\text{distance}=\frac{\left|mP_{x}+b-P_{y}\right|}{\sqrt{m^{2}+1}}$$ $$\perp\text{line equation: }y=-\frac{1}{m}x+P_{y}+\frac{P_{x}}{m}$$ $$\text{The Intersection: }\left(\frac{mP_{y}-mb+P_{x}}{m^{2}+1},\ \frac{m^{2}P_{y}+mP_{x}+b}{m^{2}+1}\right)$$
Point Slope Form
$$y-C_{y}=m\left(x-C_{x}\right)$$ In this form, $C$ is a point known to be on the line. The slope of the line is $m.$ We next write the perpendicular line that goes through point $P$, not on the original line. $$\perp\ \text{line equation: }y-P_{y}=-\frac{1}{m}\left(x-P_{x}\right)$$ $$\text{the Intersection:}\ \left(\frac{m^{2}C_{x}-mC_{y}+P_{x}+mP_{y}}{m^{2}+1},\frac{-mC_{x}+C_{y}+mP_{x}+m^{2}P_{y}}{m^{2}+1}\right)$$ $$\text{distance: }\frac{\left|mP_{x}-mC_{x}+C_{y}-P_{y}\right|}{\sqrt{m^{2}+1}}$$
Parametric Form
$$\left(\begin{array}{c} x\\ y \end{array}\right)=\left(\begin{array}{c} C_{x}\\ C_{y} \end{array}\right)+t\left(\begin{array}{c} u_{x}\\ u_{y} \end{array}\right)$$ Parametric form is similar to point slope form in that we have a point $C$ on the line and a vector $\mathbf{u},$ giving the direction of the line. Of course a direction vector is not a slope, so like the normal form, the line can possibly be vertical. Again we consider a point $P$ that is not on the line and we will write an equation for a perpendicular line passing through point $P.$ Obviously, point $P$ can be any point, including $C$ if desired. The perpendicular vector switches the vector elements of $\mathbf{u}$ and changes the sign for either one of them. Variable $t$ is a dummy variable. When $t=0,$ the line will be at point $P.$ Otherwise, the points of the line will be $P$ plus the $t$ multiple of vector $\mathbf{u}.$
When the vector $\mathbf{u}$ is written as $(-u_{y},u_{x})=u^{\perp}$ it is known as "u perp”. That is because it is clear that the perpendicular line equation will go through whatever point is given and has the direction $u^{\perp}.$ $$\perp\ \text{line equation: } \left(\begin{array}{c} x\\ y \end{array}\right)=\left(\begin{array}{c} P_{x}\\ P_{y} \end{array}\right)+t\left(\begin{array}{c} -u_{y}\\ u_{x} \end{array}\right) $$ $$\text{the Intersection: }\left(\begin{array}{c} x_{1}\\ y_{1} \end{array}\right)=P+\frac{(C-P)u^{\perp}}{\left(u^{\perp}\right)^{2}}u^{\perp}\text{ careful! don't divide by vectors}$$ \[ \text{distance: }\left\|\frac{(C-P)u^{\perp}}{\left(u^{\perp}\right)^{2}}u^{\perp}\right\| \] Without the modulo operation, the distance calculation yields a vector which has the correct direction and its length is the distance.
Polar Form
Normal Polar Form
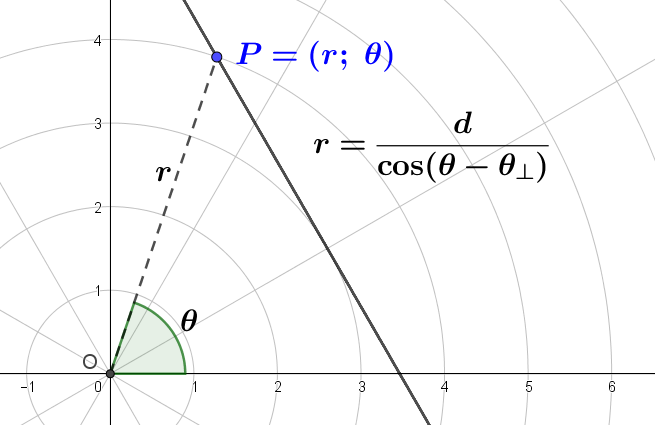
Rarely, a line is defined in polar coordinates $r$ and $\theta$. I consider the next equation as the "normal'' polar line equation, although there are others as will be shown soon enough. The word "normal'' here is a pun insofar as the equation makes use of the perpendicular line in its definition. \[ r=\frac{d}{\cos(\theta-\theta_{\perp})} \]
The equation is sufficiently uncommon that I feel the need to show a derivation. In polar coordinates, each point is given by a distance $r$ from the center and an angle $\theta$ from the $x$-axis. If the distance, $r$, is negative, it just means to proceed in the opposite direction. If the angle, $\theta,$ is negative, it means to move clockwise, as positive is counter-clockwise. Also, any angle greater than $2\pi$ can be reduced by increments of $2\pi.$ Now suppose we have a point $P$ on our line. It might look something like this. Note that we use a semicolon to separate polar coordinates and a comma to separate Cartesian coordinates.
The point is described in terms of its distance $r,$ and angle $\theta,$ from the origin. Now suppose we construct a perpendicular to the line and call the intersection $E$. It would have a yet to be determined angle, $\theta_{\perp},$but we could get the distance since it would be the adjacent leg of a right triangle. Let $P(r;\theta)$ represent any point on the line. Point $E$ is $d$ units from the origin at an angle of $\theta_{\perp}.$
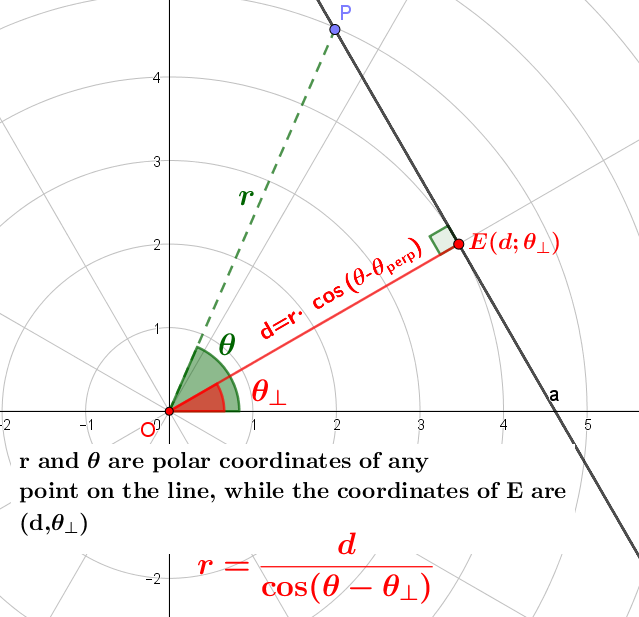
Let $\theta$ be the angle to our arbitrary point $P,$ then in the right triangle OEP, the adjacent leg has length \[ d=r\cdot\cos(\theta-\theta_{\perp}) \] and we have created an equation that describes the line in polar coordinates $(r,\theta).$ Unscrambled, it is \[ r=\frac{d}{\cos(\theta-\theta_{\perp})}. \] Because $(1/\cos\theta)=\sec\theta,$ we will sometimes see this written as $r=d\cdot\sec(\theta-\theta_{\perp}).$ So don't let that confuse you. An example line equation could be $r=4/\cos(t-\pi/3).$ The intersection coordinates are given by the equation itself. \[ E=(d;\theta_{\perp})=(4;\pi/3) \]
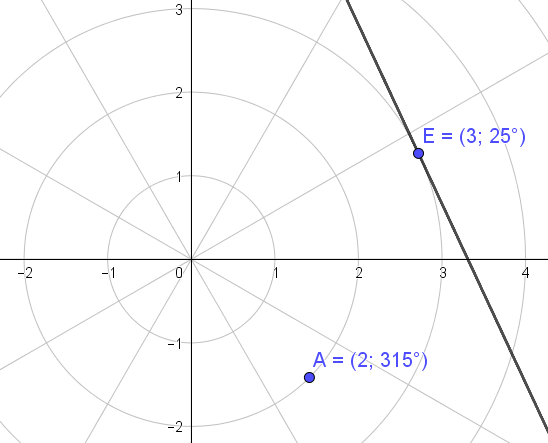
Example What is the polar equation of the line perpendicular to $r(t)=3/\cos(t-25^{\circ})$ and which passes through the point $(2;\ -\pi/4).$ Answer: Lets start by looking at a sketch of the line and we can locate the intersection, $E$ since we know its coordinates from the equation. $E=(3;\ 25^{\circ}).$ And we can graph the point which we want our perpendicular line to go through.
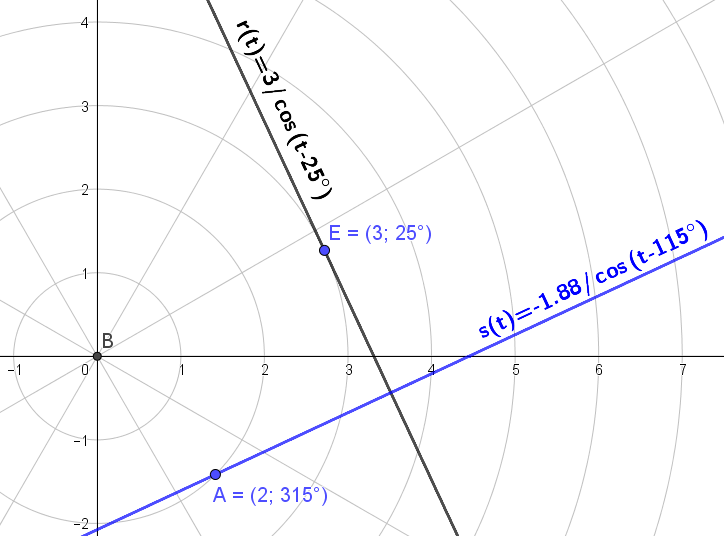
The line that is perpendicular to $r(t)$ must be rotated $90^{\circ}$ more, so its equation angle would be $\left(25^{\circ}+90^{\circ}\right).$ The line equation will be \[ s(t)=\frac{d}{\cos(t-115^{\circ})} \] but what is $d?$ Well, the perpendicular line must also go through point $A=(2;\ 315^{\circ})$ which means that when $t=315^{\circ}$ that $s(t)$ must be $2.$ \[ 2=\frac{d}{\cos(315^{\circ}-115^{\circ})}=\frac{d}{\cos(200^{\circ})}=\frac{d}{\cos\left(\frac{10}{9}\pi\right)} \] \[ d=2\cos\left(\frac{10}{9}\pi\right)\approx-1.88 \] and the negative distance just means that we proceed in the opposite direction from the one given. The final graph shows the line and the perpendicular line.
Standard Form Converted to Polar
In each of these subsections, all we have done is replace $x$ and $y$ with $r\cos\theta$ and $r\sin\theta$ and then solve for $r.$ \[ ax+by+c=0 \] \[ r=\frac{-c}{a\cdot\cos\theta+b\sin\theta} \]
Slope Intercept Form Converted to Polar
\[ y=mx+b \] \[ r=\frac{b}{\sin\theta-m\cdot\cos\theta} \]
Point Slope Form Converted to Polar
\[ y-C_{y}=m(x-C_{x}) \] \[ r=\frac{C_{x}\;m-C_{y}}{m\cdot\cos\theta-\sin\theta} \]