This is equivalent to `Find the third point of a triangle given the first two points and the length of all three sides.' Here are the two problems. Please understand, these are the same problem!
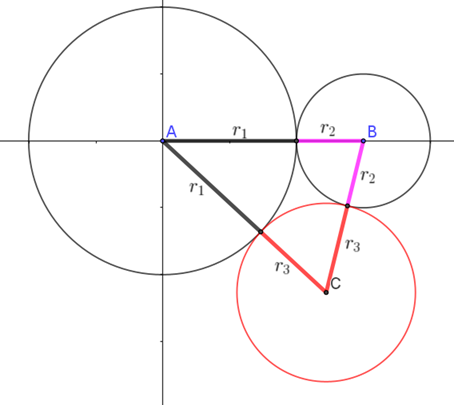
Problem 1. Given two tangent circles (circles A and B), find a third circle externally tangent to both. We are given the radius for all three circles, $r_{1},r_{2},r_{3}.$ To solve this without reams of paper, translate one of the given circles to $(0,0).$ Translate the second circle by the amounts used for the first one. Now rotate the second circle about the origin until its center is on the x-axis. This makes the algebra tractable.
Labelling can matter! Let side 'a' be opposite point A. Let side 'b' be opposite point B. Let side 'c' be opposite point C.
\[\begin{align*} a & =r_{2}+r_{3}\\ b & =r_{1}+r_{3}\\ c & =r_{1}+r_{2} \end{align*}\]Problem 2. Find the third point in a triangle, given two points and the length of all three sides.
If we knew the coordinates of point C, we would have the solution to problem 1, since the radius of the third circle is given in that problem. From figure 1 we can see that given points $A$ and $B$ and all three radii, we have a triangle and know all three leg lengths. This problem can be solved $\textbf{without}$ translation and rotation using vectors.
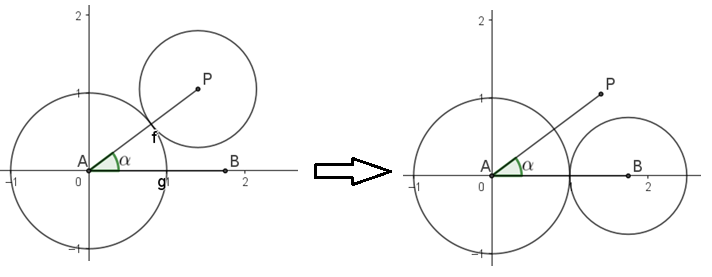
Translate circle $A$ to the origin. For example, if the center of $A$ were $(5,2)$ just subtract 5 from the $x$ coordinate and subtract $2$ from the $y$ coordinate. Remember those values and do exactly the same subtraction from the coordinates of $B.$
Great, so now circle $A$ is at the origin, but likely circle $B$
is not on the $x$-axis, so we will need to rotate the axis until
it is. Now suppose in our example that circle $B,$ after translation, has a center at
$(1.4,1.05).$ How much do we need to rotate it to get it onto the
axis. We know that $\tan^{-1}(y/x)$ is the angle to rotate by.
\[
\tan^{-1}\left(\frac{y}{x}\right)=\tan^{-1}\left(\frac{1.05}{1.4}\right)=\alpha=0.6435011088\text{ rads}
\]
So we set up a rotation matrix and matrix multiply our point to rotate
it.
\[
\binom{1.4}{1.05}\left(\begin{array}{cc}
\cos\left(\alpha\right) & -\sin\left(\alpha\right)\\
\sin\left(\alpha\right) & \cos\left(\alpha\right)
\end{array}\right)=\binom{1.75}{0}
\]
So after translation, but before rotation, our circle was in position
$P,$ and it was rotated to position $B.$
Now with most of the nonsense out of the way, we can setup and solve an algebra problem to find the center of circle $C.$ The radii of the 3 circles are $r_{1},r_{2},r_{3}.$ Now we want the center of a third circle that is externally tangent to both of these. Quite clearly, there are two such circles, one above and one below. So create an unknown center, $C,$and imagine a circle around it with radius $r_{3}.$ If we construct a circle about $A$ with radius $r_{1}+r_{3},$ and a circle about $B$ with radius $r_{2}+r_{3},$ then the intersection of those circles will be a point that is distance $r_{1}+r_{3}$ from $A,$ and $r_{2}+r_{3}$ from $B.$ Let's write the equation of those circles.
\begin{equation} x^{2}+y^{2}=\left(r_{1}+r_{3}\right)^{2}\tag{EQ1 . . .} \end{equation} \begin{equation} \left(x-(r_{1}+r_{2})\right)^{2}+y^{2}=\left(r_{2}+r_{3}\right)^{2}\tag{EQ2 . . .} \end{equation} Now subtract. $EQ2-EQ1$ to eliminate the $y$ term. \[ -x^{2}+\left(-r_{1}-r_{2}+x\right)^{2}=-\left(r_{1}+r_{3}\right)^{2}+\left(r_{2}+r_{3}\right)^{2} \] Next expand this. \[ r_{1}^{2}+2\;r_{1}\;r_{2}-2\;r_{1}\;x+r_{2}^{2}-2\;r_{2}\;x=-r_{1}^{2}-2\;r_{1}\;r_{3}+r_{2}^{2}+2\;r_{2}\;r_{3} \] and solve for $x.$ \[ x=\frac{r_{1}^{2}+r_{1}\;r_{2}+r_{1}\;r_{3}-r_{2}\;r_{3}}{r_{1}+r_{2}} \] Finally, plug that value back into $EQ1$ and solve for $y.$ \[ y=\pm2\cdot\frac{\sqrt{r_{1}^{2}\;r_{2}\;r_{3}+r_{1}\;r_{2}^{2}\;r_{3}+r_{1}\;r_{2}\;r_{3}^{2}}}{r_{1}+r_{2}} \]
So we should try it. From our earlier example, we used $r_{1}=1, r_{2}=0.75$ and we didn't specify $r_{3}.$ So we could try several values for $r_{3}$ which will give different centers for $C,$ but should result in tangent circles nonetheless.
| $r_{3}$ | $C_{x}$ | $C_{y}$ |
| $0.5$ | $1.0714285714$ | $-1.04978$ |
| $0.75$ | $1.1071428571$ | $-1.3552618544$ |
| $1.0$ | $1.1428571429$ | $-1.6413036133$ |
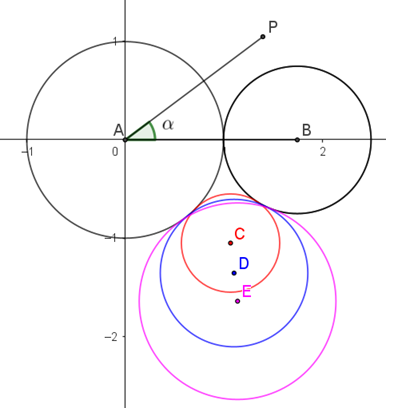
There is of course a 2nd solution for centers that uses the other sign for $y.$ I haven't shown those. Also, we still have to unrotate the centers and then translate back to where ever they came from. All in all, this is a lot of work. The matrix to rotate the points back is \[ \left(\begin{array}{cc} \cos\left(\alpha\right) & \sin\left(\alpha\right)\\ -sin\left(\alpha\right) & \cos\left(\alpha\right) \end{array}\right) \] Just multiply each center point by that matrix with your point on the left as before. Then untranslate and you're done.
If we knew the coordinates of point C, we would have the solution to problem 1, since the radius of the third circle is given in that problem. From figure 1 we can see that given points $A$ and $B$ and all three radii, we have a triangle and know all three leg lengths. This problem can be solved $\textbf{without}$ direct translation and rotation.
Step 1: Create a unit vector from point A to point B. \[ \mathbf{u}=\frac{B-A}{|B-A|} \] \[ \mathbf{u}=\frac{B-A}{|B-A|} \] \[ \mathbf{u}=\frac{\binom{B_{x}}{B_{y}}-\binom{A_{x}}{A_{y}}}{\sqrt{\left(B_{x}-A_{x}\right)^{2}+\left(B_{y}-A_{y}\right)^{2}}}=\left(\begin{array}{c} \left(\frac{B_{x}-A_{x}}{\sqrt{\left(B_{x}-A_{x}\right)^{2}+\left(B_{y}-A_{y}\right)^{2}}}\right)\\ \left(\frac{B_{y}-A_{y}}{\sqrt{\left(B_{x}-A_{x}\right)^{2}+\left(B_{y}-A_{y}\right)^{2}}}\right) \end{array}\right) \]
Step 2: Create the two perpendicular unit vectors to $\mathbf{u}.$ \[ \mathbf{v}_{1}=\binom{\mathbf{u}_{y}}{\mathbf{-u}_{x}} \] \[ \mathbf{v_{2}=-v_{1}}=\binom{\mathbf{-u}_{y}}{\mathbf{u}_{x}} \]
Step 3: Use the law of cosines to get the cosine for the angle $\angle CAB.$
\[
\cos\theta=\frac{c^{2}+b^{2}-a^{2}}{2bc}\text{ This is where labelling matters.}
\]
\[\begin{align*}
a & =r_{2}+r_{3}\\
b & =r_{1}+r_{3}\\
c & =r_{1}+r_{2}
\end{align*}\]
For reference, here is our triangle.
Or, we could do it this way.
\[
\cos\theta=\frac{\left(r_{1}+r_{2}\right){}^{2}+\left(r_{1}+r_{3}\right)^{2}-\left(r_{2}+r_{3}\right)^{2}}{2\left(r_{1}+r_{3}\right)\left(r_{1}+r_{2}\right)}
\]
Step 4: Now if $b$ is the length between $A$ and $C,$we can add the component lengths to $A$ and directly find $C.$ \[ C_{1}=A+b\cos\theta\cdot\mathbf{u}+b\sin\theta\cdot\mathbf{v}_{1} \] \[ C_{2}=A+b\cos\theta\cdot\mathbf{u}+b\sin\theta\cdot\mathbf{v}_{2} \]
This completely avoids the translations and rotations, permitting the work to be done on the original points in any orientation.